提供者:杜成玉
下载地址:http://www.cvlibs.net/datasets/kitti/
概述
数据来源:https://blog.csdn.net/solomon1558/article/details/70173223
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。整个数据集由389对立体图像和光流图,39.2 km视觉测距序列以及超过200k 3D标注物体的图像组成[1] ,以10Hz的频率采样及同步。总体上看,原始数据集被分类为’Road’, ’City’, ’Residential’, ’Campus’ 和 ’Person’。对于3D物体检测,label细分为car, van, truck, pedestrian, pedestrian(sitting), cyclist, tram以及misc组成。
数据采集平台
如图-1所示,KITTI数据集的数据采集平台装配有2个灰度摄像机,2个彩色摄像机,一个Velodyne 64线3D激光雷达,4个光学镜头,以及1个GPS导航系统。具体的传感器参数如下[2] :
·2 × PointGray Flea2 grayscale cameras (FL2-14S3M-C), 1.4 Megapixels, 1/2” Sony ICX267 CCD, global shutter
·2 × PointGray Flea2 color cameras (FL2-14S3C-C), 1.4 Megapixels, 1/2” Sony ICX267 CCD, global shutter
·4 × Edmund Optics lenses, 4mm, opening angle ∼ 90◦, vertical opening angle of region of interest (ROI) ∼ 35◦
·1 × Velodyne HDL-64E rotating 3D laser scanner, 10 Hz, 64 beams, 0.09 degree angular resolution, 2 cm distance accuracy, collecting ∼ 1.3 million points/second, field of view: 360◦ horizontal, 26.8◦ vertical, range: 120 m
·1 × OXTS RT3003 inertial and GPS navigation system, 6 axis, 100 Hz, L1/L2 RTK, resolution: 0.02m / 0.1◦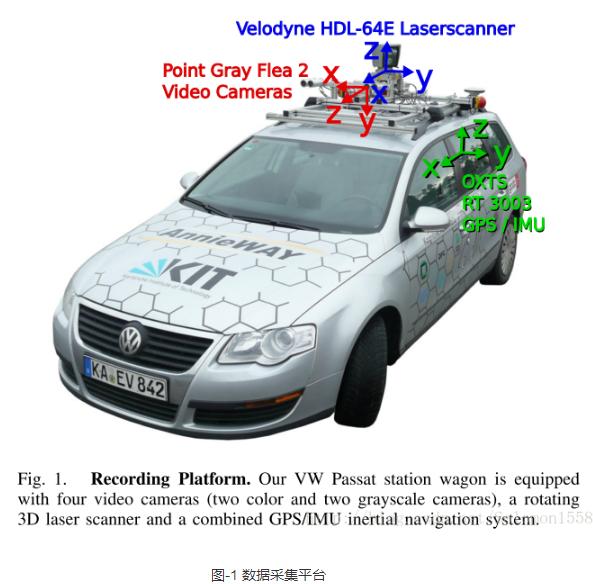
如图-2所示为传感器的配置平面图。为了生成双目立体图像,相同类型的摄像头相距54cm安装。由于彩色摄像机的分辨率和对比度不够好,所以还使用了两个立体灰度摄像机,它和彩色摄像机相距6cm安装。为了方便传感器数据标定,规定坐标系方向如下[2] :
• Camera: x = right, y = down, z = forward
• Velodyne: x = forward, y = left, z = up
• GPS/IMU: x = forward, y = left, z = up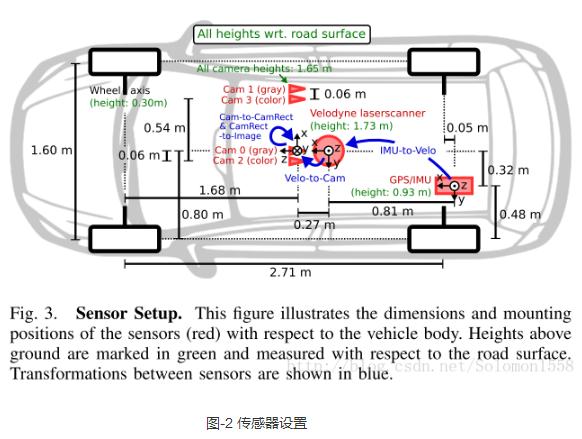
Dataset详述
图-3展示了KITTI数据集的典型样本,分为 ’Road’, ’City’, ’Residential’, ’Campus’ 和’Person’五类。原始数据采集于2011年的5天,共有180GB数据。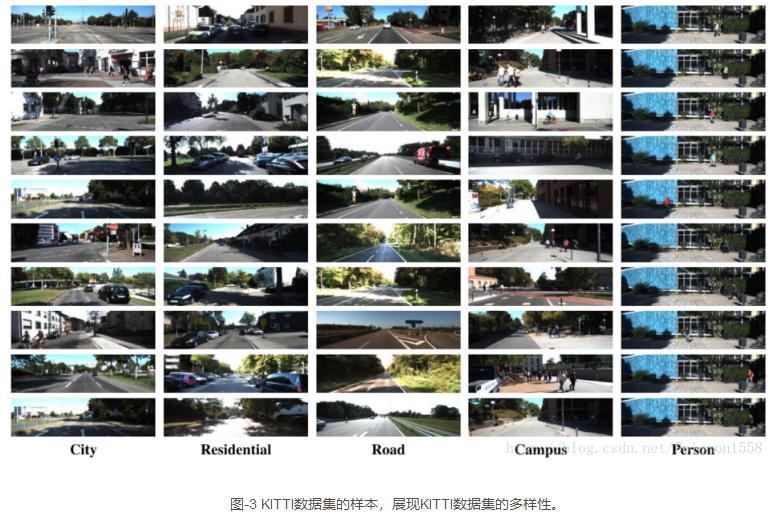
数据组织形式
论文[2] 中提及的数据组织形式,可能是早期的版本,与目前KITTI数据集官网公布的形式不同,本文稍作介绍。 如图-4所示,一个视频序列的所有传感器数据都存储于data_drive文件夹下,其中date和drive是占位符,表示采集数据的日期和视频编号。时间戳记录在Timestamps.txt文件。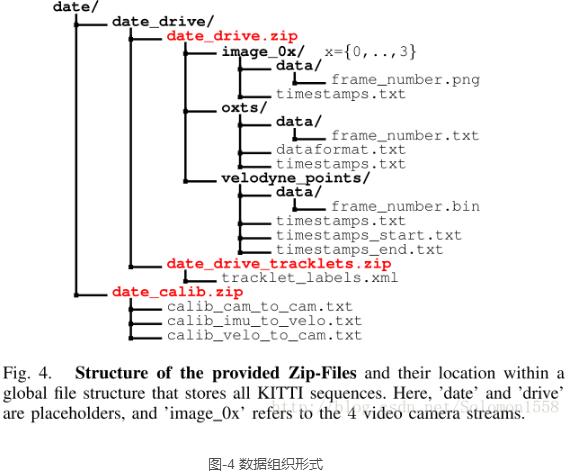
Annotations
KITTI数据集为摄像机视野内的运动物体提供一个3D边框标注(使用激光雷达的坐标系)。该数据集的标注一共分为8个类别:’Car’, ’Van’, ’Truck’, ’Pedestrian’, ’Person (sit- ting)’, ’Cyclist’, ’Tram’ 和’Misc’ (e.g., Trailers, Segways)。论文[2] 中说明了3D标注信息存储于date_drive_tracklets.xml,每一个物体的标注都由所属类别和3D尺寸(height,weight和length)组成。当前数据集的标注存于每种任务子数据集的label文件夹中,稍有不同。
为了说明KITTI数据集的标注格式,本文以Object detection任务的数据集为例。数据说明在Object development kit的readme.txt文档中。从标注数据的链接 training labels of object data set (5 MB)下载数据,解压文件后进入目录,每张图像对应一个.txt文件。一帧图像与其对应的.txt标注文件如图-5所示。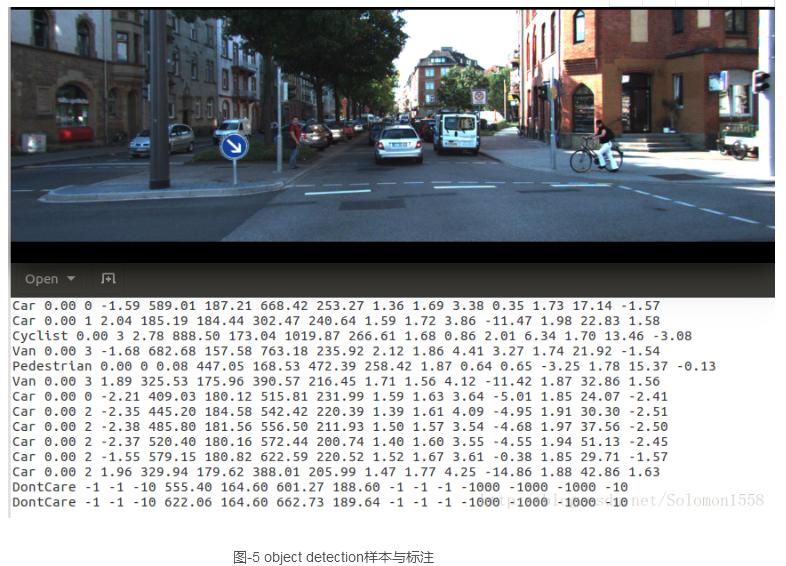
Development Kit
KITTI各个子数据集都提供开发工具 development kit,主要由cpp文件夹,matlab文件夹,mapping文件夹和readme.txt组成。下图以object detection任务的文件夹devkit_object为例,可以看到cpp文件夹主要包含评估模型的源代码evaluate_object.cpp。Mapping文件夹中的文件记录训练集到原始数据集的映射,从而开发者能够同时使用激光雷达点云,gps数据,右边彩色摄像机数据以及灰度摄像机图像等多模态数据。Matlab文件夹中的工具包含读写标签,绘制2D/3D标注框,运行demo等工具。Readme.txt文件非常重要,详述介绍了某个子数据集的数据格式,benchmark介绍,结果评估方法等详细内容。
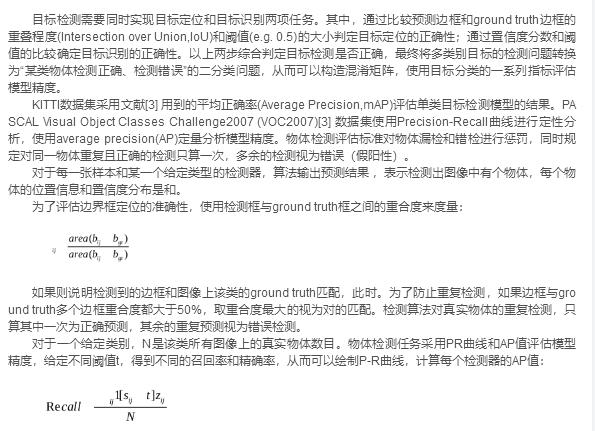
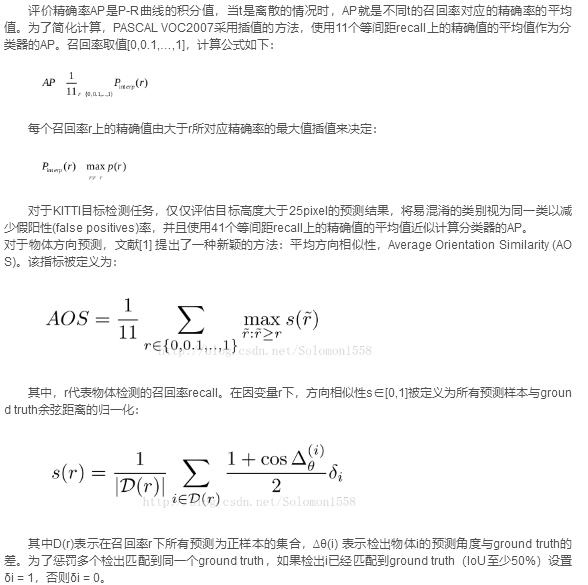
评价准则Evaluation Metrics
数据使用实践
KITTI数据集的标注信息更加丰富,在实际使用中可能只需要一部分字段,或者需要转换成其他数据集的格式。例如可以将KITTI数据集转换成PASCAL VOC格式,从而更方便地使用Faster RCNN或者SSD等先进的检测算法进行训练。转换KITTI数据集需要注意源数据集和目标数据集的格式,类别标签的重新处理等问题,实现细节建议参考Jesse_Mx[4] 和github上manutdzou的开源项目[5] ,这些资料介绍了转换KITTI数据集为PASCAL VOC格式,从而方便训练Faster RCNN或者SSD等模型。
相关论文
[1] Andreas Geiger and Philip Lenz and Raquel Urtasun. Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite. CVPR, 2012
[2] Andreas Geiger and Philip Lenz and Christoph Stiller and Raquel Urtasun. Vision meets Robotics: The KITTI Dataset. IJRR, 2013
[3] M. Everingham, L.Van Gool, C. K. I.Williams, J.Winn, and A. Zisserman. The PASCAL Visual Object Classes Challenge 2011 (VOC2011) Results.
[4] Jesse_Mx.SD: Single Shot MultiBox Detector 训练KITTI数据集(1).
http://blog.csdn.net/jesse_mx/article/details/65634482
[5]manutdzou.manutdzou/KITTI_SSD.https://github.com/manutdzou/KITTI_SSD